ziegler nichols tuning method
The situation has not changed much despite the fact that a large. Turn the controller gain Kc up slowly more positive if Kc was decided to be so in step 1 otherwise more negative if Kc was found to be negative in step 1 and observe the output response.

Pid Tuning Methods Incatools
Here is how to tune a controller using these rules.

. The usefulness of PID lies in its. To apply the Ziegler-Nichols Closed-Loop method for tuning controllers follow these steps. A popular method for tuning P PI and PID controllers is the ZieglerNichols method.
DCS engineers often use this method when they need to tune new loops. The modified method works only on self-regulating processes but then more accurately so. Methods are called PID Tuning and you should be aware of their existence.
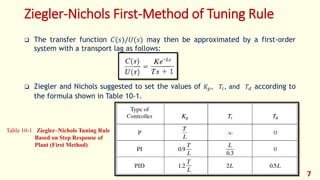
The time-honored Ziegler-Nichols tuning rule 23 Z-N rule as introduced in the 1940s had a large impact in making PID feedback controls acceptable to control engineersPID was known but applied only reluctantly because of stability concerns. This video shows how to perform PID Controller Tuning using the classical closed-loop tuning Ziegler Nichols Method. Pg227 The tuning settings based on the process reaction curves obtained by the open-loop tuning method in addition to the Ziegler-Nichols method Table 238 can also be selected by other methods.
A brief description is provided along w. ZieglerNichols Tuning Method Understanding the PID Controller Vishakha Vijay Patel Vishakha Patel has completed her BE Electrical and Electronics Engineering from the CMR Institute of Technology Bangalore. We may then start fine-tuning the controller using the basic rules that relate each parameter to the response characteristics as.
The Ziegler-Nichols PID tuning method is simple and intuitive. The reaction-curve method was designed for use on integrating and self-regulating processes. PID controllers are widely used in many industries such as paper mill cotton textile industries.
Remove integral actions from the controller by setting it to either 0 if it is in units of reset. To tune them properly the Ziegler-Nichols method is used which includes an ultimate-gain method and a step-response method. Typically worded as doesnt have.
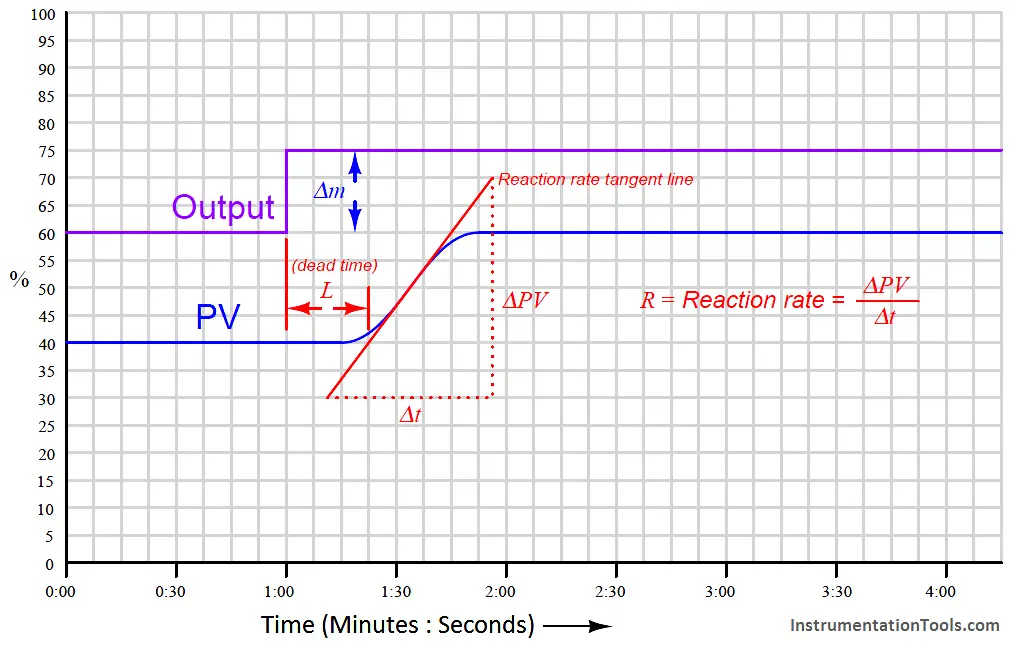
The frequency of. Ziegler-Nichols PID Tuning Methods Reaction-Curve Method Measurements are made on the open-loop system to determine controller parameters. If in units of integral set it to be very large.
Product changes grade changes load changes are scheduled. Turn both the Integral and Derivative modes off. PID controller also finds its applications in drones.
With the Ziegler-Nichols rule engineers finally had a practical and systematic way of tuning PID loops for improved performance. Turn the controller to P-only mode ie. Make sure no process changes eg.
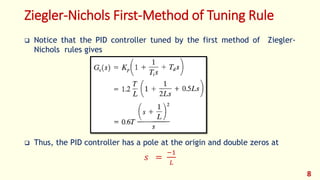
6413 The ZieglerNichols Method. The landmark ZieglerNichols ZN tuning method from 1942 for proportional-integral-derivative PID controller has had significant impacts on the industrial control industry to this day even though it is thought to be an empirical method with little theoretical justifications. Its also simple intuitive and it obtains reasonable performance for simple loops.
Basically Ziegler-Nichols works well enough when the dead time is small compared to the time constant of the process. Up to 10 cash back The objective of this article is to study the speed control of a DC motor using PID controller and understand the Ziegler-Nichols ZN tuning method for a PID controller. This will let you tune the derivative proportional and integral gains.
The standard reference for PID tuning seems to be the Ziegler-Nichols tuning rules developed in 1942 on a pneumatic controller. The tuning method described below is actually a widely-used modification of the published Ziegler-Nichols Process Reaction Curve method. Her work interests are in the domain of control systems especially controls in aeronautical and biomedical fields.
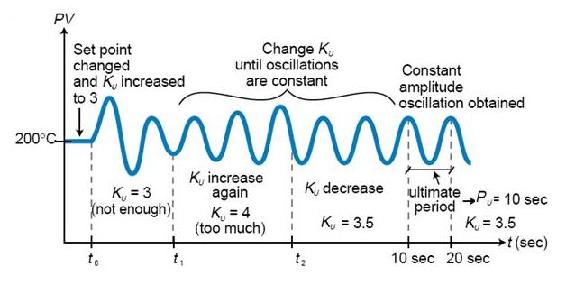
Open-loop system is stable and its step response doesnt ring. The value of KP at the point of instability is called KMAX. Ziegler-Nichols Tuning Method These parameters will typically give you a response with an overshoot on the order of 25 with a good settling time.
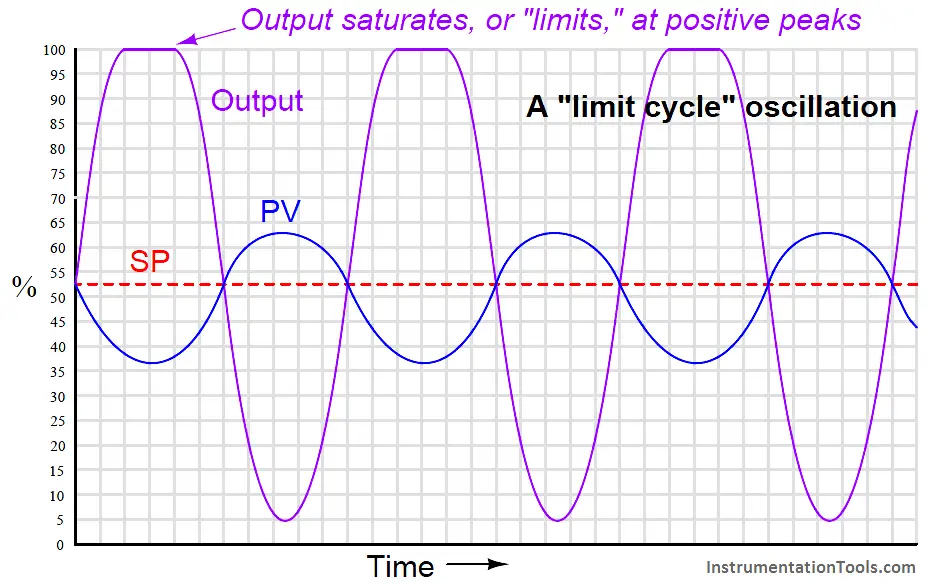
In this short tutorial I will take you through the two Ziegler-Nichols tuning methods. Can only be used. If the loop is currently oscillating make sure that the Process Variable stops oscillating when the controller is placed in Manual mode.
This method starts by zeroing the integral and differential gains and then raising the proportional gain until the system is unstable.
Ziegler Nichols Pid Controller Tuning Method Youtube
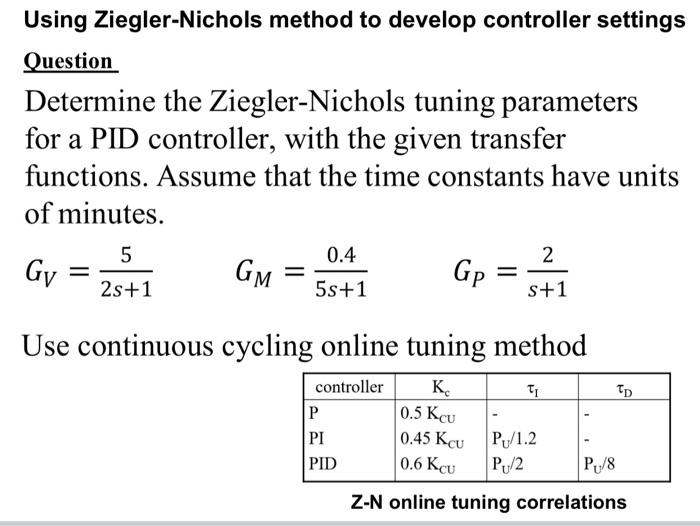
Solved Using Ziegler Nichols Method To Develop Controller Chegg Com

Ch2b Slide65 Ziegler Nichols Open Loop Pid Tuning Cont D Youtube

Pdf Application Of Ziegler Nichols Method For Tuning Of Pid Controller Semantic Scholar

Can Ziegler Nichols Equations Be Used To Tune Non Interactive Controllers

Control System Ziegler Nichols Method Use Time Value Of 63 Of Process Variable Or Steady State Level Line Electrical Engineering Stack Exchange

Ziegler Nichols Tuning Formula Download Table
Ziegler Nichols Closed Loop Method Ultimate Gain Inst Tools

Ziegler Nichols Tuning Formula Download Table

Ziegler Nichols Method An Overview Sciencedirect Topics
Modern Control Lec 06 Pid Tuning

Ziegler Nichols Pid Controller Tuning Method Modifying Kp Ki And Kd Download Scientific Diagram

Continuous Cycling Method Ziegler Nichols Method Youtube
Ziegler Nichols Open Loop Method Inst Tools

Tuning Based Ziegler Nichols Second Method 7 Download Table

Engineers Excel Com Ziegler Nichols Closed Loop Tuning Calculator
Modern Control Lec 06 Pid Tuning

Pid Controller And Ziegler Nichols Method How To Get Oscillation Period Electrical Engineering Stack Exchange
9 3 Pid Tuning Via Classical Methods Engineering Libretexts
No comments for "ziegler nichols tuning method"
Post a Comment